As an avid FPV drone pilot, I enjoy building and flying my own drones. One problem I face when flying is poor video quality. In an FPV drone, the camera is connected to the VTX (video transmitter), which sends the video feed to a pair of goggles, which the pilot uses to view their surroundings. Essentially, this means you can pilot the craft at high speeds from the drones point of view. Unfortunately, the video range is usually quite poor, which limits the distance that you can fly it. There are probably several solutions to getting more range out of your VTX, from inceasing the transmit power to reducing video bandwidth. However, since I'm also a ham, I like to overengineer things. Thus, here I will introduce a design for a motorized and completely automatic signal tracker, which can pinpoint the location of a drone in real time. If you know the direction the drone is, you can use another mount to point a directional antenna at it to obtain much greater range and higher SNR. However, this device is not just limited to drone tracking. With its incredible bandwidth and versatility, it lends itself to a plethora of tasks, like locating hidden camera transmitters, cars, satellites, IoT systems, and more.
The Design
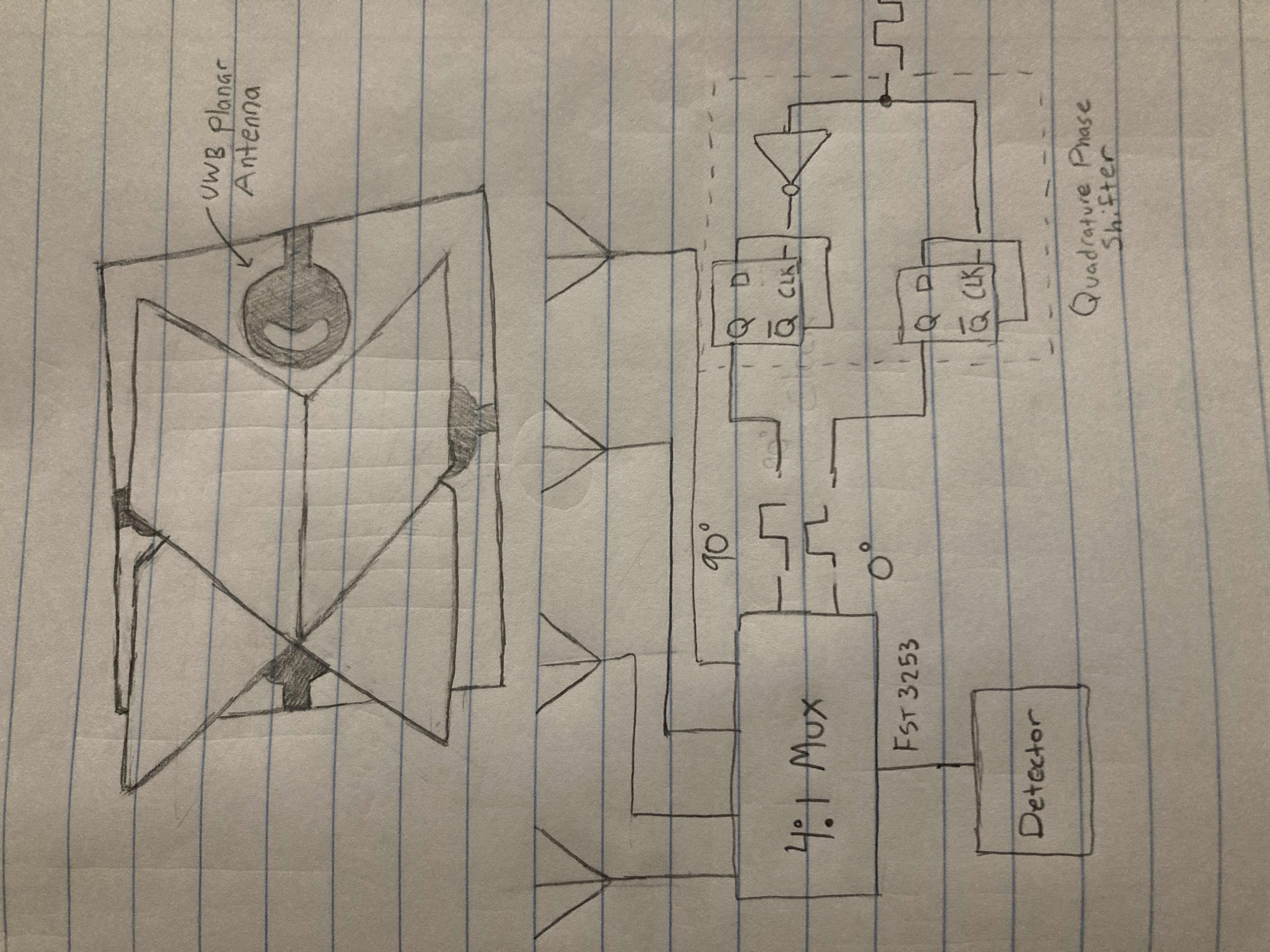
The tracker is mounted on an alt-azimuth mount consisting of lightweight servos. A platform consisting of two perpendicularly-oriented RF-opaque panels is mounted on the mount, with four wideband omnidirectional antennas at the base. Each of these antennas connects to an input of a 4-channel multiplexer, which in turn feeds a detector.
This detector can be anything that is capable of accurately sensing the amplitude of an RF signal at a specific frequency. In this example, it is an SDR receiver. The bandwidth of the receiver isn't critical, because it will simply tune to the signal's carrier. However, the frequency range of the SDR will determine the capabilities of the tracker. For example, to detect signals in the 5.8GHz range (the frequency of analog FPV transmissions), you will need a receiver capable of tuning this high, like the HackRF One.
The workings of this tracker is quite simple: depending on the direction of the RF source, some sections of the array will receive the signal stronger than others. If the source is straight ahead of the array, each antenna's received signal will be of equal amplitudes. However, if it is coming from the left, the RF-opaque panels will attenuate the signal going to the antennas on the right side. The SDR will receive the signals from each antenna and compare them. In this example, it will recognize that the signals hitting the left side are stronger, thus it will rotate the servo mount to the left. It will continue comparing the signal strengths and rotating until the received signals from each of the antennas are roughly equal, which means it is pointing directly at the RF signal source.
Multiplexed Antennas
Without some way of switching between the antennas, you would need four independant receivers or detectors to realize a system of this design: one receiver for each antenna. As you can imagine, this increases the cost of the system quite dramatically. However, there is a simple way to remedy this: multiplexing. A multiplexer is an electronic device capable of forwarding any of its multiple inputs to a single output channel. Essentially, it is an electronic switch that can select which antenna is connected to the detector. The multiplexer is controlled by a number of select lines, which are pulled high or low in a binary pattern to control which channel is active. We want our tracker to rotate through the four antennas at a steady pace and record the signal strength from each antenna. There are a number of ways to do this. This simplest way is to use the system's computer to generate the binary signals to control the multiplexer. Since there are four input channels, the multiplexer can operate using just two select lines, with each line representing a binary bit. Therefore you could do this with just two digital output pins on a microcontroller or SBC.
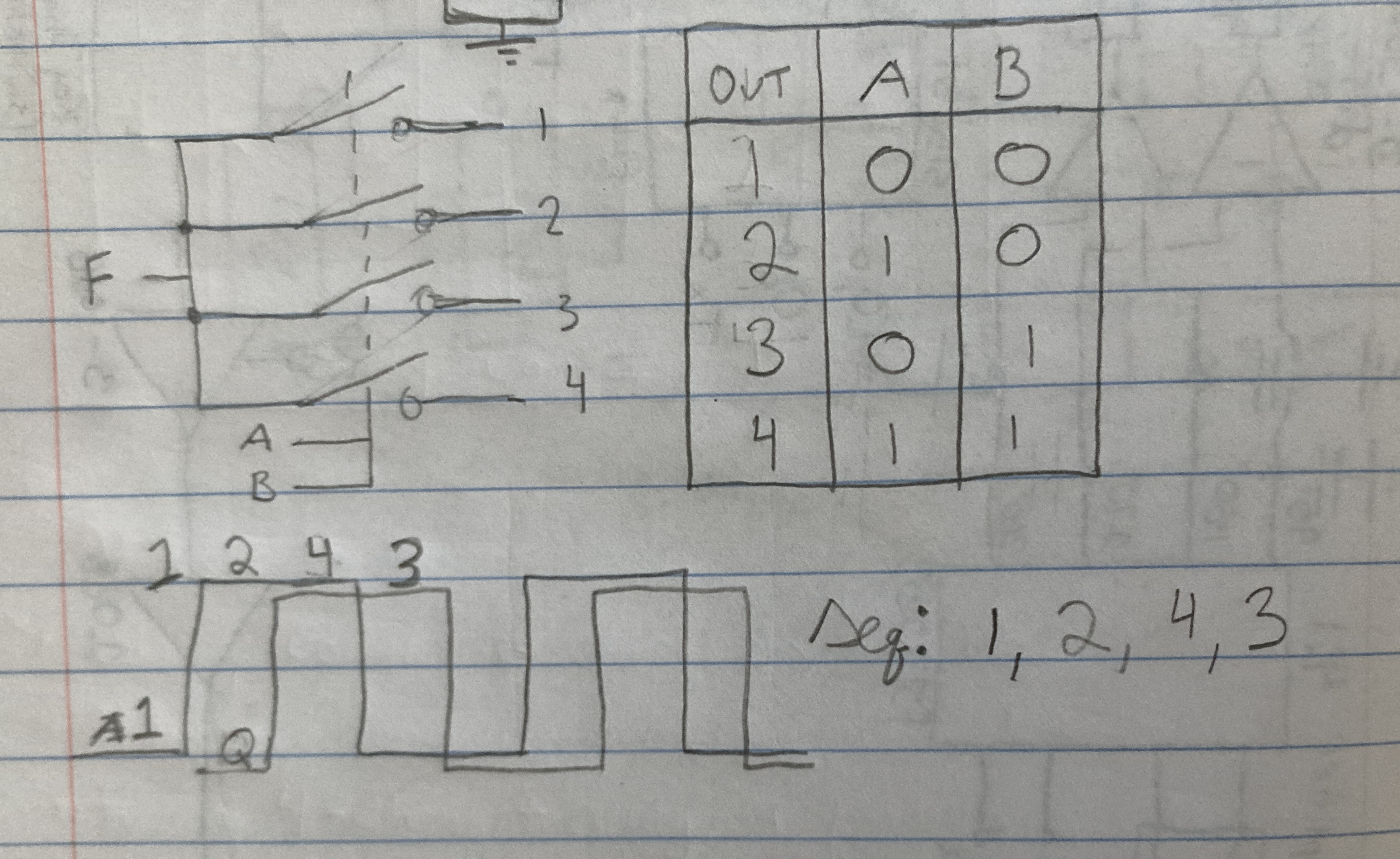
Another method of generating the select signals is to use a quadrature phase-shifted square wave on the select lines, which can be easily achieved using a pair of flip flops and a clock source. A 555-timer configured as an astable multivibrator could be used to produce the clock. Using this quadrature clock will alternate through the elements in the following pattern: 00, 10, 11, and 10. As you can see, the third and fourth numbers are switched, which would have to be accounted for in software. A diagram of the quadrature phase-shifted clock's behavior is presented at left.
The next step is to differentiate the signals from each antenna. If controlling the select lines with a microcontrollers GPIO, this is quite simple. You can simply push the desired antenna element address to the multiplexer with the digital outputs, determine the signal strength at that antenna with a detector, and move on. This is easy because you know exactly which antenna you are receiving from. In the second example with the quadrature clock, this is a bit harder to achieve. One approach is to use a frequency quadrupler on the clock. This frequency multiplied signal will feed into a hardware interrupt on the microcontroller or SBC. The interrupt handler will increment a value from 0 with each call until it reaches 3, at which point it will reset back to 0. This value corresponds to the currently active antenna. The interrupt handler will also read the signal strength from the detector and correlate that with the antenna index value, placing it into the appropriate buffer for each antenna. Theres a lot more complexity involved with this approach, which is why I would prefer to directly control the multiplexer with GPIO. However, using an external clock allows the microcontroller to operate with less overhead. Instead of manually switching IO and reading signal strength, this approach only uses interrupts.
The Mount
The mount for this device is not critical, thus I will only briefly mention it here. If you already are using a motorized mount to point a directional antenna, the system can just be mounted parallel to your existing antenna. If you desire a small standalone system that could be deployed anywhere, perhaps using a couple small servos like the SG90 would be advantageous. The mount doesn't need to hold much weight as the entire assembly can be consructed out of very lightweight materials like copper tape and thin plastic sheets.
RF-Opaque Panels
These panels protrude from the base at 90-degree angles from each other. They are intended to shield the signal from certain antenna elements to allow for differentiation of the received signal strength. For this reason, they are an integral part of this tracker. As with most other aspects of this design, their construction is not critical. They can be made out of any material that reflects or absorbs radio waves including copper, aluminum, and more. You may choose to construct them out of sheet metal, copper clad PCB, or even plastic sheets covered in copper tape. Note that their lengths will likely somewhat determine the accuracy of the system, with longer panels providing more ability to distinguish signals, thus improved accuracy.
Antenna Considerations
The final point of this discussion are the antennas. These parts are responsible for acquiring the signal, which is very important. Because this device is designed for relatively short-range applications like drone tracking, the antennas are also not very critical. However, they should be pretty omnidirectional to reduce the amount of blind spots. Additionally, if operation over a large frequency range is desired, wideband antennas are a good idea. Wideband omnidirectional antenna designs for microwave applications like these are plentiful, and most can be constructed very easily from household materials. They are often directly etched onto PCBs, which could make a good base to hold the RF-opaque panels. Alternatively, you could use copper tape on a plastic sheet to create the antennas and mount. An excellent article by Osama Haraz and Abdel-Razik Sebak outlining some ultrawideband low gain microwave antennas can be found here.
Conclusion
This simple mechanism allows the tracker to locate signals from any direction and automatically point the mount at it, removing the need for complicated phase detection algorithms. This is an excellent solution if you are already using a motorized mount with a directional antenna and would like to track signals automatically. Because it doesn't rely on GPS and altitude telemetry from a drone to point an antenna, it can detect any target with lower latency. However, this design is not well suited for precision applications. Because it relies on the difference in received signal strength to locate a signal source, it can be skewed by strong signals on the same frequency. For example, you may have two drones transmitting on the same video channel. In such cases, it woudn't be able to track either of them. Nevertheless, I believe it is a effective design, which could prove useful for drone pilots or anyone else interested in locating sources of RF signals. Thank you for reading and I hope you found this article interesting.